
1. Dairəvi toxuculuq maşını texnologiyasının tətbiqi
1. Dairəvi toxuculuq maşınının qısa təqdimatı
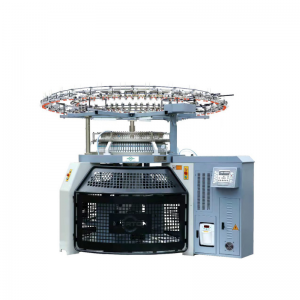
Dairəvi toxuculuq toxuculuq maşını (Şəkil 1-də göstərildiyi kimi) pambıq ipliyi boruşəkilli parça halına gətirən bir cihazdır. Əsasən müxtəlif növ qaldırılmış toxunmuş parçalar, futbolka parçaları, dəlikli müxtəlif naxışlı parçalar və s. toxumaq üçün istifadə olunur. Quruluşuna görə, toxuculuq sənayesində geniş istifadə olunan tək cersey dairəvi toxuculuq maşını və ikiqat cersey dairəvi toxuculuq maşınına bölünə bilər.
 2. Proses tələbləri
2. Proses tələbləri
(1) İnverterin güclü ətraf mühit müqavimətinə malik olması tələb olunur, çünki yerindəki iş mühitinin temperaturu nisbətən yüksəkdir və pambıq yun soyutma fanının asanlıqla dayanmasına və zədələnməsinə, soyutma dəliklərinin isə tıxanmasına səbəb ola bilər.
(2) Çevik inçləmə əməliyyat funksiyası tələb olunur. Inçləmə düymələri avadanlığın bir çox yerində quraşdırılıb və inverterin tez cavab verməsi tələb olunur.
(3) Sürət nəzarətində üç sürət tələb olunur. Biri, adətən 6Hz ətrafında olan inç əməliyyat sürətidir; digəri, ən yüksək tezlik 70Hz-ə qədər olan normal toxuma sürətidir; üçüncüsü, təxminən 20Hz tezlik tələb edən aşağı sürətli yığma əməliyyatıdır.
(4) Dairəvi toxuculuq maşınının işləməsi zamanı mühərrikin geri və fırlanması qəti qadağandır, əks halda iynə yatağının iynələri əyiləcək və ya qırılacaq. Dairəvi toxuculuq maşını tək fazalı rulman istifadə edərsə, bu nəzərə alınmayacaq. Sistem irəli və geri fırlanırsa, bu, tamamilə mühərrikin irəli və geri fırlanmasından asılıdır. Bir tərəfdən, tərs fırlanmanı qadağan edə bilməli, digər tərəfdən isə fırlanmanı aradan qaldırmaq üçün DC əyləcini qurmalıdır.
3. Performans tələbləri
Toxuculuq zamanı yük ağır olur və inçləmə/başlama prosesi sürətli olmalıdır ki, bu da inverterin aşağı tezlikli, böyük fırlanma momenti və sürətli cavab sürətinə malik olmasını tələb edir. Tezlik çeviricisi mühərrikin sürət sabitləşdirmə dəqiqliyini və aşağı tezlikli fırlanma momenti çıxışını artırmaq üçün vektor idarəetmə rejimindən istifadə edir.
4. İdarəetmə naqilləri
Dairəvi toxuculuq toxuculuq maşınının idarəetmə hissəsi mikrokontroller və ya PLC + insan-maşın interfeysi idarəetməsini qəbul edir. Tezlik çeviricisi başlatma və dayandırma üçün terminallar tərəfindən idarə olunur və tezlik analoq miqdar və ya çoxmərhələli tezlik qəbulu ilə verilir.
Çoxsürətli idarəetmə üçün əsasən iki idarəetmə sxemi mövcuddur. Biri tezliyi təyin etmək üçün analoqdan istifadə etməkdir. İstər qaçış, istərsə də yüksək və aşağı sürətli işləmə olsun, analoq siqnal və işləmə təlimatları idarəetmə sistemi tərəfindən verilir; digəri isə tezlik çeviricisindən istifadə etməkdir. Daxili çoxmərhələli tezlik tənzimləməsi, idarəetmə sistemi çoxmərhələli tezlik keçid siqnalı verir, qaçış inverterin özü tərəfindən təmin edilir və yüksək sürətli toxuma tezliyi inverterin analoq miqdarı və ya rəqəmsal tənzimləməsi ilə verilir.
2. Yerində tələblər və istismara vermə planı
(1) Yerində tələblər
Dairəvi toxuculuq dəzgahları sənayesində inverterin idarəetmə funksiyası üçün nisbətən sadə tələblər mövcuddur. Ümumiyyətlə, başlanğıc və dayandırmanı idarə etmək üçün terminallara qoşulur, analoq tezlik verilir və ya tezliyi təyin etmək üçün çoxsürətli rejimdən istifadə olunur. Sürətli olmaq üçün inçləmə və ya aşağı sürətli işləmə tələb olunur, buna görə də inverter aşağı tezlikdə böyük aşağı tezlikli fırlanma anı yaratmaq üçün mühərriki idarə etməlidir. Ümumiyyətlə, dairəvi toxuculuq dəzgahlarının tətbiqində tezlik çeviricisinin V/F rejimi kifayətdir.
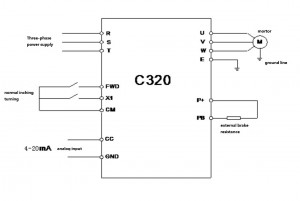
(2) Sazlama sxemi Tətbiq etdiyimiz sxem: C320 seriyalı sensorsuz cərəyan vektoru çeviricisi Güc: 3.7 və 5.5KW
3. Parametrlərin və təlimatların sazlanması
1. Naqil sxemi
2. Sazlama parametrlərinin qəbulu
(1) F0.0=0 VF rejimi
(2) F0.1=6 tezlikli giriş kanalı xarici cərəyan siqnalı
(3) F0.4=0001 Xarici terminal nəzarəti
(4) F0.6=0010 tərs fırlanmanın qarşısının alınması etibarlıdır
(5) F0.10=5 sürətlənmə müddəti 5S
(6) F0.11=0.8 yavaşlama müddəti 0.8S
(7) F0.16=6 daşıyıcı tezliyi 6K
(8) F1.1=4 Fırlanma momentinin gücləndirilməsi 4
(9) F3.0=6 X1-i irəli qaçışa təyin edin
(10) F4.10=6, qaçış tezliyini 6HZ-ə təyin edin
(11) F4.21=3.5 Qaçış sürətlənmə vaxtını 3.5S-ə təyin edin
(12) F4.22=1.5 qaçış yavaşlama müddətini 1.5S-ə təyin edir
Sazlama Qeydləri
(1) Əvvəlcə mühərrikin istiqamətini təyin etmək üçün qaçış edin.
(2) Qaçış zamanı titrəmə və yavaş reaksiya problemlərinə gəldikdə, qaçışın sürətlənməsi və yavaşlama müddəti tələblərə uyğun olaraq tənzimlənməlidir.
(3) Aşağı tezlikli fırlanma momenti daşıyıcı dalğa və fırlanma momentinin gücləndirilməsini tənzimləməklə təkmilləşdirilə bilər.
(4) Pambıq hava kanalını bağlayır və ventilyator dayanır, bu da invertorun istilik yayılması prosesinin zəifləməsinə səbəb olur. Bu vəziyyət tez-tez baş verir. Hazırda ümumi invertor istilik siqnalizasiyasını buraxır və sonra istifadəyə davam etməzdən əvvəl hava kanalındakı tükləri əl ilə təmizləyir.
Yazı vaxtı: 08 sentyabr 2023